'새로운 달 탐사의 시대(New Moon Rush).'
지난 15일 중국의 달 탐사위성 '창어 3호'의 월면 탐사차 '위투(玉兎.옥토끼)'호가 로봇팔을 이용해 달 표면을 과학탐측하는 데 성공했다. 1972년 미국과 1976년 구소련이 성공한 데 이어 세계에서 세번째로 달 착륙과 탐사에 성공한 것.
1960년대 미국과 소련의 달 탐사 경쟁 이후 최근 중국과 인도 등이 달 탐사에 적극적으로 나서면서 새로운 달 탐사 경쟁이 시작된 가운데 우리나라의 달 탐사 및 관련 로봇 기술에 대한 관심도 높아지고 있다.
■신자원 찾아 달탐사 떠나는 선진국들
지난주 중국이 달 탐사 로봇의 가동에 성공하며 아시아 국가들의 달 탐사를 둘러싼 경쟁이 치열해지고 있다. 중국은 이번 달 탐사 성공을 넘어 오는 2017년 달 귀환선을 발사하고 2030년까지 달에 유인기지를 세울 계획을 발표했다.
인도 역시 지난 2008년 무인우주선 '찬드라얀 1호'를 발사해 달 궤도 진입에 성공한 이후 2020년까지 우주인을 달에 보낸다는 계획을 수립했다.
아시아 국가들의 추격이 거세지자 미국도 다시 달에 관심을 갖기 시작했다. 미 항공우주국(NASA)은 지난 9월 무인탐사선 라디(LADEE)를 달에 보냈다. 2025년 달 기지 건설을 목표로 사전 조사를 하기 위해서다.
이렇게 세계 각국이 달 탐사를 중심으로 우주개발에 뛰어드는 이유는 무엇일까. 바로 우주기술이 신기술과 고부가가치를 창출하는 '종합 체계기술'이기 때문이다. 우주개발을 통해 '미래의 부'를 창출할 수 있는 동력을 갖게 된다는 것.
경제협력개발기구(OECD)의 연구결과에 따르면 우주개발의 경제적 효과는 투입비용 대비 직접효과가 1.75~3.4배, 간접효과는 4배 이상에 달하는 것으로 알려졌다. 특히 달의 경우 현재 '헬륨3' 등 핵융합 원료와 희귀광물이 풍부하게 매장돼 있는 것으로 추정되고 있어 이를 선점할 경우 큰 경제적 이득을 취할 것이라는 분석이다.
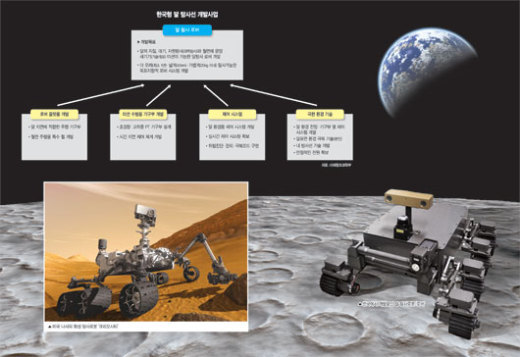
이에 우리나라도 오는 2020년을 목표로 달 탐사에 나설 것을 발표했다. 2020년 6월까지 한국형 발사체 개발을 완료해 우주로 쏘아올리고 그해 12월 달 궤도선과 착륙선 등 탐사선을 발사체에 실어 보낸다는 목표다.
달 궤도선은 현재 지구 상에 떠 있는 위성의 형태와 유사하며 발사 후 1년간 달 주변을 돌며 자기장과 먼지 등을 관측한다. 달 착륙선에는 원자력전지로 움직이는 탐사 로봇인 '로버(Rover)'를 탑재할 계획이다. '방랑자'라는 뜻을 가진 로버는 인간이 갈 수 없는 달에 대신 파견돼 달 표면의 희토류 등 광물탐사를 할 예정이다.
19일 현재 우리나라는 미래창조과학부를 중심으로 한국항공우주연구원 등 15개 정부출연연구기관과 함께 '달 탐사 출연(연) 협력협의회'를 출범시키고 달 탐사용 4단 발사체와 달탐사선, 심우주지상국, 탐사 로버 개발을 위한 선행연구에 돌입했다.
■달 탐사 핵심 기술 '로버', 극한환경 극복이 관건
달 탐사 프로젝트의 핵심이라고 할 수 있는 달 탐사 로봇 로버는 항우연과 한국과학기술연구원(KIST)이 주축이 돼 개발에 나서고 있다.
항우연은 지난해 달 탐사 계획이 확정되기 이전인 2010년부터 달 및 행성탐사용 로버 기반연구를 수행해 왔고 KIST는 지난해 9월 세계적 로봇 전문가인 여준구 박사를 달탐사연구사업 추진단장으로 선임해 연구에 나서고 있다. KIST는 달탐사연구사업 추진단에 박사급 연구원 20여 명을 투입하고 달 탐사 로버용 이동조작시스템과 이동 메커니즘, 구동 모듈을 갖춘 차체 등 로버의 주요 부분 및 탐사선용 원자력 2차전지를 개발할 예정이다.
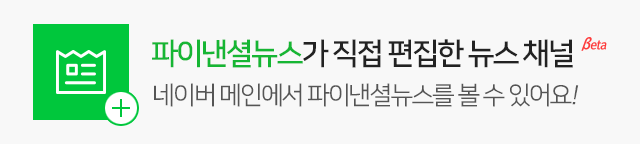
이번에 우리나라가 개발할 탐사 로버는 20㎏ 이하의 무인 자동차 형태가 될 전망이다. 미국의 탐사 로봇 큐리오시티와 중국의 위토가 100㎏에 육박하는 것에 비하면 매우 작은 크기다. 로버를 실려보낼 한국형 발사체의 크기가 작은 편이기 때문에 최대한 가벼우면서 장기간 넓은 범위를 효율적으로 탐사할 수 있는 로버시스템을 개발하는 것이 국내 연구진의 목표다.
2020년 발사될 로버는 달 표면에서 40㎞ 이상 탐사를 목표로 한다. 울퉁불퉁한 달 표면에서 원활히 주행할 수 있도록 특수 휠을 6개에서 8개 장착하고 원격 조정이 가능하도록 스테레오 이미지 처리 및 각종 센서를 활용한 비전기반 주행시스템 연구도 주요한 과제다.
탐사 로버를 개발하고 구동하는 데 있어 핵심은 극한의 기온차를 버티는 기술과 먼지 제어 기술이다. 영하 130도에서 영상 180도의 밤과 낮이 2주 간격으로 오가는 달 표면에서 로버 시스템이 고장나지 않고 역할을 수행할 수 있도록 우리 연구진은 태양열과 원자력 전지를 동력으로 내부 열 제어 시스템을 도입할 예정이다. 동물로 치자면 정온동물처럼 로버 내 온도를 일정하게 맞춰주는 것이다.
바람이 없는 달 표면에서 먼지가 센서 등에 문제를 일으키지 않도록 케어할 수 있는 시스템을 개발하는 것도 달 탐사 프로젝트 성공의 관건이다.
달 탐사연구사업 추진단장을 맡고 있는 여준구 박사는 "정전기 현상이 심한 달의 경우 달 탐사 로버에 달라붙는 미세 먼지를 쓸어주거나 케어할 수 있는 기술 개발도 중요하다"며 "효율성을 최대화하면서도 새로운 형태의 로버를 선보일 수 있도록 최선을 다해 연구에 몰두하겠다"고 말했다.
jhpark@fnnews.com 박지현 기자

※ 저작권자 ⓒ 파이낸셜뉴스, 무단전재-재배포 금지