미국 항공우주국(나사)이 화성에 착륙시킨 로버(탐사로봇) ‘퍼시비어런스’가 시험 주행에 성공했다.
지난 5일(현지시간) BBC를 비롯한 외신들은 퍼시비어런스가 지난 4일 화성 착륙지점이었던 ‘예제로 크레이터’에서 33분간 6.5m를 이동했다고 보도했다.
비록 이동 거리는 짧았지만 나사의 프로젝트 과학자인 케이티 스택 보건은 이것을 매우 중대한 순간이라고 밝혔다.
그는 “로버가 움직이는 순간 우리들은 화성 표면의 탐사자들이 된 것이나 마찬가지”라고 의미를 부여했다.
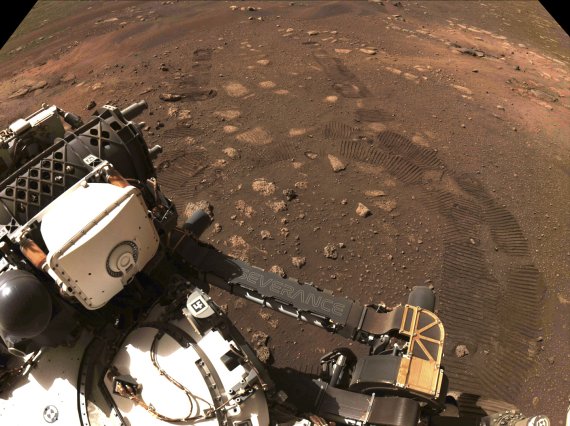
무게가 1t인 퍼시비어런스는 지난달 18일 화성에 착륙한 이후 로봇 팔을 비롯한 장비의 준비 작업을 진행했다. 이번 첫 주행에서 퍼시비어런스는 전진 후 150도 정도 회전했다가 약간 후진을 했다고 나사는 밝혔다.
차량 엔지니어인 아나이스 자리피안은 “바퀴 자국이 남은 것을 보고 이처럼 기쁜 적은 없다”고 말했다.
예제로는 수십억년전에 호수로 생명체가 살았던 곳으로 추정돼 나사는 이곳을 착륙 지점으로 정했다. 나사는 착륙지점을 미국 공상과학 작가 옥타비아 E 버틀러의 이름을 따 명명했다.
나사는 앞으로 2년에 걸쳐 로버를 15km로 주행시킨다는 계획이다.

퍼시비어런스는 초당 5cm를 움직이면서 주변을 촬영한다. 기존 로버들과 달리 달리면서 동시에 사진을 처리해서 지구로 보낼 수 있다. 자리피안 엔지니어는 이것을 “껌을 씹으며 사람이 걸어가는 것과 같은 것”이라고 설명했다.
앞으로 또다른 퍼시비어런스의 주요 임무는 무게가 2kg인 소형 헬기의 비행이다. 나사는 퍼시비어런스 내부에 실려온 헬기를 날릴 적합한 장소를 물색할 예정이다.
jjyoon@fnnews.com 윤재준 기자
※ 저작권자 ⓒ 파이낸셜뉴스, 무단전재-재배포 금지