과기정통부, '차세대 피지컬 AI 모델 기반 휴머노이드 미래선점기술 개발 전략' 소개
[파이낸셜뉴스] 피지컬 인공지능(AI) 기반 휴머노이드 로봇이 새로운 실제 환경에서도 다양한 감각을 실시간 통합 처리할 수 있도록 개발된다. 물체의 미세한 압력이나 진동을 느끼고, 사람의 표정을 읽으면서 로봇들끼리 협업하면서 부품 교체 등도 스스로 인지해 복구할 수 있도록 지원한다는 계획이다.
과학기술정보통신부는 29일 한국로봇학회와 융합연구혁신전략위원회 등 산·학·연 전문가와 정책 관계자 등이 참석한 가운데, '미래융합포럼 2025 상반기 세션(부제:차세대 피지컬 AI 모델 기반 휴머노이드 미래선점기술 개발 전략)'을 서울대학교 해동첨단공학관에서 개최하고 이 같은 계획을 공개했다.
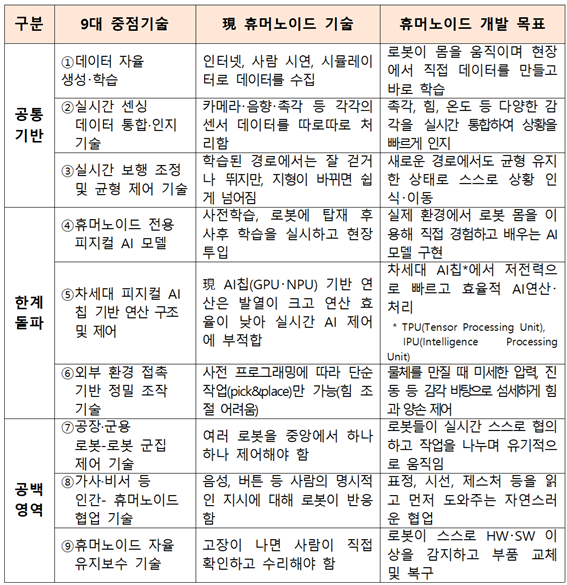
과기정통부가 이날 소개한 '차세대 피지컬 AI 모델 기반 휴머노이드 미래선점기술 개발 전략(안)'은 2040년 범용 휴머노이드 일상화 시대를 대비해 △공통 기반, △한계 돌파, △연구개발 공백 영역, 세가지 축으로 9대 중점기술(기술혁신 과제)을 담고 있다.
우선 로봇이 몸을 움직이며 현장에서 직접 데이터를 만들고 바로 학습하도록 하고, 촉각·힘·온도 등 다양한 감각을 실시간 통합해 상황을 빠르게 인지해 새로운 경로에서도 균형 유지한 상태로 스스로 상황 인식과 이동이 가능토록 개발할 예정이다.
또 기존 한계를 돌파해 실제 환경에서 로봇 몸을 이용해 직접 경험하고 배우는 AI모델을 구현한다. 차세대 AI칩에서 저전력으로 빠르고 효율적 AI연산과 처리가 가능토록 하고, 물체를 만질 때 미세한 압력이나 진동 등 감각 바탕으로 섬세하게 힘과 양손 제어가 가능토록 한다.
이와 함께 로봇들이 실시간 스스로 협의해 작업을 나누며, 표정이나 시선, 제스처 등을 읽고 먼저 도와주는 자연스러운 협업을 연구한다. 로봇이 스스로 HW・SW 이상을 감지하고 부품 교체 및 복구도 가능토록 하는 개발도 진행한다.
김보열 과기정통부 공공융합기술정책과장은 "오는 2030 년 단순업무가 가능한 휴머노이드에서 2035년 비언어적 의사소통이 가능한 로봇으로 발전하고 2040년에 개인비서로봇이 가능토록 하는 게 목표"라며 "내년 상반기 기술개발을 본격화하도록 신규예산을 할당해 지원한다"고 설명했다.
과기정통부는 미래개척융합과학기술개발 사업을 통해 이 같은 휴머노이드 관련 중점기술에 대한 투자를 확대하다는 계획이다. 그 간 확산된 융합연구 문화를 기반으로 휴머노이드 연구성과 축적·통합 및 실증·검증하는 체계를 강화하고 급변하는 기술 환경변화 대응을 위한 '무빙타겟' 제도 등 혁신적인 연구방식을 도입할 예정이다.
이번 휴머노이드 개발 전략의 주요내용은 오는 2026년도 융합연구개발 활성화 시행계획에 반영돼 추진된다.
정택렬 과기정통부 공공융합연구정책관은 “민간에서 당장 준비하기 어려운 미래 선점 기술을 선별·투자해 범용 휴머노이드 일상화 시대 선도국 도약을 위한 마중물 역할을 하겠다”고 밝혔다.
jiany@fnnews.com 연지안 기자
※ 저작권자 ⓒ 파이낸셜뉴스, 무단전재-재배포 금지